बेहतर चार-पहिया ड्राइव क्या है, आगे या पीछे
सामग्री
कार में ड्राइव इंजन से किसी भी पहिये तक टॉर्क का स्थानांतरण है, जो फिर ड्राइव बन जाता है। तदनुसार, सभी वाहनों में पहिया सूत्र जैसी महत्वपूर्ण विशेषता होने लगती है, जहां पहला अंक पहियों की कुल संख्या को दर्शाता है, और दूसरा - ड्राइविंग की संख्या।

लेकिन यह अवधारणा ऑटोमोबाइल चेसिस की एक और महत्वपूर्ण संपत्ति को प्रतिबिंबित नहीं करती है, जो धुरी अंशकालिक ड्राइव, पीछे या सामने से आगे बढ़ रही है? हालाँकि 4×4 या 6×6 ऑल-व्हील ड्राइव कारों के लिए यह कोई मायने नहीं रखता।
चार पहिया ड्राइव क्या है, पीछे और सामने से अंतर
प्रत्येक प्रकार के अपने फायदे और नुकसान हैं, इसलिए वे अभी भी सापेक्ष संतुलन में मौजूद हैं। सैद्धांतिक दृष्टिकोण से, एक ऑल-व्हील ड्राइव से एक फ्रंट- या रियर-व्हील ड्राइव कार केवल ट्रांसमिशन भागों को हटाकर प्राप्त की जाती है जो एक या दूसरे पहिये पर कर्षण संचारित करते हैं। दरअसल, टेक्नोलॉजी हासिल करना इतना आसान नहीं है।
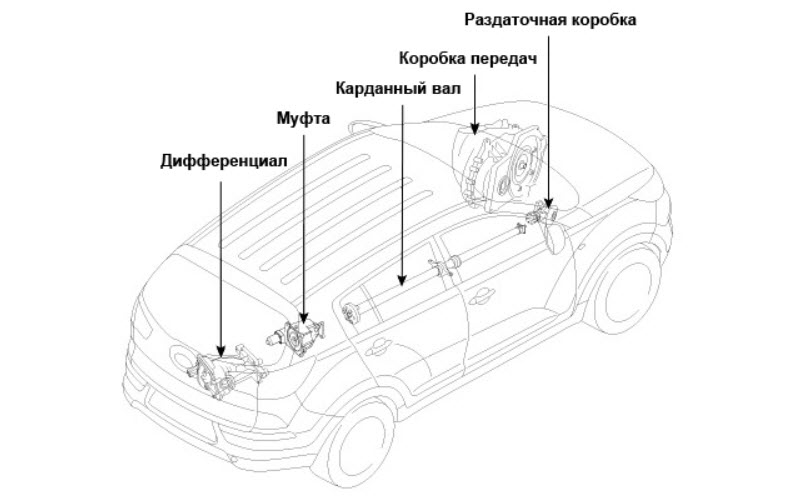
ऑल-व्हील ड्राइव वाहन की एक अनिवार्य इकाई एक ट्रांसफर केस या ट्रांसफर केस है, जो एक्सल के साथ टॉर्क वितरित करता है।
मोनो-ड्राइव कारों में, इसकी आवश्यकता नहीं है, लेकिन इसे आसानी से बाहर नहीं किया जा सकता है, राजदतका को बिजली इकाई की सामान्य योजना में एकीकृत किया गया है, इसलिए पूरी कार पुनर्व्यवस्था के अधीन है।
विपरीत मामले की तरह, यदि प्रारंभ में एक ऑल-व्हील ड्राइव संशोधन जोड़ा जाता है, उदाहरण के लिए, एक ही मॉडल की फ्रंट-व्हील ड्राइव कारें, तो इसमें बड़ी जटिलताएँ होंगी।
बहुत से निर्माता अपनी हैचबैक और सेडान में 4 × 4 संस्करण जोड़ने की कोशिश भी नहीं करते हैं, खुद को ग्राउंड क्लीयरेंस में वृद्धि और क्रॉस-मॉडिफिकेशन के लिए प्लास्टिक बॉडी किट तक सीमित रखते हैं।
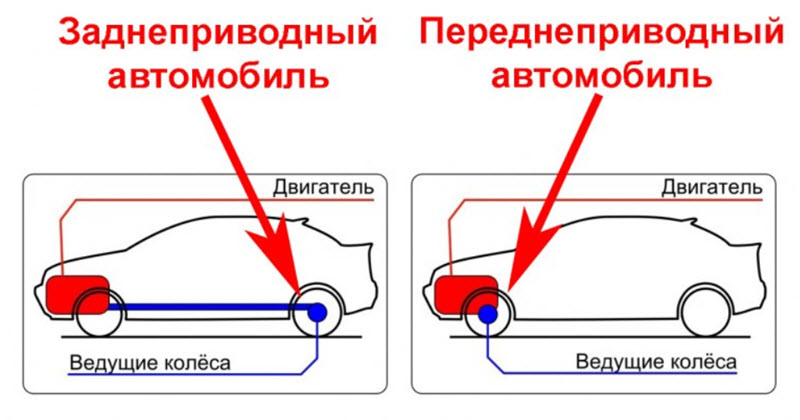
यह समग्र लेआउट पर भी लागू होता है. ऐतिहासिक रूप से, यह पहले ही विकसित हो चुका है कि फ्रंट-व्हील ड्राइव वाहनों में बिजली इकाई इंजन डिब्बे में स्थित होती है, गियरबॉक्स दो शाफ्ट से सुसज्जित होता है जिसमें निरंतर वेग वाले जोड़ (सीवी जोड़) होते हैं जो सामने के पहियों तक जाते हैं, जो एक साथ संचालित और नियंत्रित होते हैं .
इसके विपरीत, रियर-व्हील ड्राइव के लिए, बॉक्स के साथ मोटर कार की धुरी के साथ स्थित होती है, फिर ड्राइवशाफ्ट रियर एक्सल पर जाता है। इन दोनों मामलों में चार-पहिया ड्राइव को जटिलता के विभिन्न स्तरों के साथ लागू किया जा सकता है।
डिवाइस और ऑपरेशन का सिद्धांत
टॉर्क संचारित करने के लिए, ट्रांसमिशन बनाने वाले घटकों और असेंबलियों के एक सेट का उपयोग किया जाता है।
इसमें शामिल है:
- गियरबॉक्स (गियरबॉक्स), कुल गियर अनुपात में बदलाव के लिए जिम्मेदार है, यानी, इंजन शाफ्ट की रोटेशन गति और ड्राइव पहियों की गति का अनुपात;
- ट्रांसफर केस, ड्राइव एक्सल के बीच टॉर्क को एक दिए गए अनुपात (जरूरी नहीं कि समान रूप से) में विभाजित करना;
- सीवी जोड़ों या हुक के जोड़ों (क्रॉस) के साथ कार्डन गियर जो अलग-अलग कोणों पर दूरी पर घूर्णन संचारित करते हैं;
- एक्सल गियरबॉक्स को ड्राइव करें, इसके अलावा रोटेशन की गति और टॉर्क ट्रांसमिशन की दिशा को बदलें;
- गियरबॉक्स को व्हील हब से जोड़ने वाले एक्सल शाफ्ट।

जैसा कि पहले ही उल्लेख किया गया है, दो मुख्य, अनुप्रस्थ और अनुदैर्ध्य बिजली इकाइयों की विशेषता, योजनाओं के कुल सेट से बाहर खड़े थे।
- पहले मामले में, ट्रांसफर केस गियरबॉक्स के किनारे से जुड़ा होता है, जबकि इसे कोणीय गियरबॉक्स भी कहा जाता है। लेआउट कारणों से, सामने के पहियों में से एक के ड्राइव शाफ्ट को इसके माध्यम से पारित किया जाता है, यहां हाइपोइड गियरिंग के साथ एक गियर जोड़ी द्वारा पीछे के एक्सल को हटा दिया जाता है, जिसके लिए रोटेशन 90 डिग्री मुड़ता है और कार्डन शाफ्ट के साथ चलता है कार।
- दूसरा मामला गियरबॉक्स आउटपुट शाफ्ट के समान अक्ष पर ट्रांसफर केस की नियुक्ति की विशेषता है। पीछे के पहियों पर कार्डन शाफ्ट ट्रांसफर केस के इनपुट शाफ्ट के साथ समाक्षीय रूप से स्थित होता है, और सामने वाले एक ही कार्डन ट्रांसमिशन के माध्यम से जुड़े होते हैं, लेकिन 180-डिग्री टॉर्क टर्न और नीचे या बग़ल में शिफ्ट के साथ।
रज़दतका काफी सरल हो सकता है, केवल उस क्षण की शाखा के लिए जिम्मेदार हो सकता है, या जटिल हो सकता है, जब क्रॉस-कंट्री क्षमता या नियंत्रणीयता बढ़ाने के लिए इसमें अतिरिक्त कार्य पेश किए जाते हैं:
- डिमल्टीप्लायर, यानी सड़क पर टॉर्क को बढ़ाने के लिए ओवरड्राइव;
- केंद्र विभेदक जो क्षण को एक निश्चित अनुपात में वितरित करता है;
- ट्रांसमिशन क्षमताओं के स्वचालित नियंत्रण की प्रणाली में एक्चुएटर्स के रूप में कार्य करने वाले विद्युत चुम्बकीय घर्षण क्लच;
- अतिरिक्त उपकरणों के लिए पावर टेक-ऑफ शाफ्ट।
4×4 मशीनों पर ड्राइव एक्सल गियरबॉक्स भी नियंत्रित अंतर या इलेक्ट्रॉनिक क्लच की उपस्थिति से जटिल हो सकते हैं। जबरन ताले और एक धुरी के अलग पहिया नियंत्रण तक।
ऑल-व्हील ड्राइव के प्रकार
विभिन्न ड्राइविंग मोड में, एक ओर दक्षता बढ़ाने के लिए और दूसरी ओर क्रॉस-कंट्री क्षमता बढ़ाने के लिए पहियों के बीच टॉर्क को फिर से वितरित करना बहुत उपयोगी है। इसके अलावा, ट्रांसमिशन जितना अधिक जटिल है, उतना ही महंगा है, इसलिए विभिन्न प्रकार और वर्गों की मशीनें अलग-अलग ड्राइव योजनाओं का उपयोग करती हैं।
स्थायी
सबसे तर्कसंगत यह होगा कि हमेशा और सभी सड़क स्थितियों में ऑल-व्हील ड्राइव का उपयोग किया जाए। यह प्रतिक्रियाओं की पूर्वानुमेयता और स्थिति में किसी भी बदलाव के लिए मशीन की निरंतर तत्परता सुनिश्चित करेगा। लेकिन यह काफी महंगा है, इसके लिए अतिरिक्त ईंधन लागत की आवश्यकता होती है और यह हमेशा उचित नहीं होता है।
अपनी सभी सादगी में स्थायी ऑल-व्हील ड्राइव (पीपीपी) की क्लासिक योजना का उपयोग चिरस्थायी सोवियत कार निवा पर किया जाता है। एक अनुदैर्ध्य इंजन, फिर एक बॉक्स, एक गियर ट्रांसफर केस एक छोटे कार्डन शाफ्ट के माध्यम से इससे जुड़ा होता है, जहां से दो शाफ्ट सामने और पीछे के एक्सल तक जाते हैं।
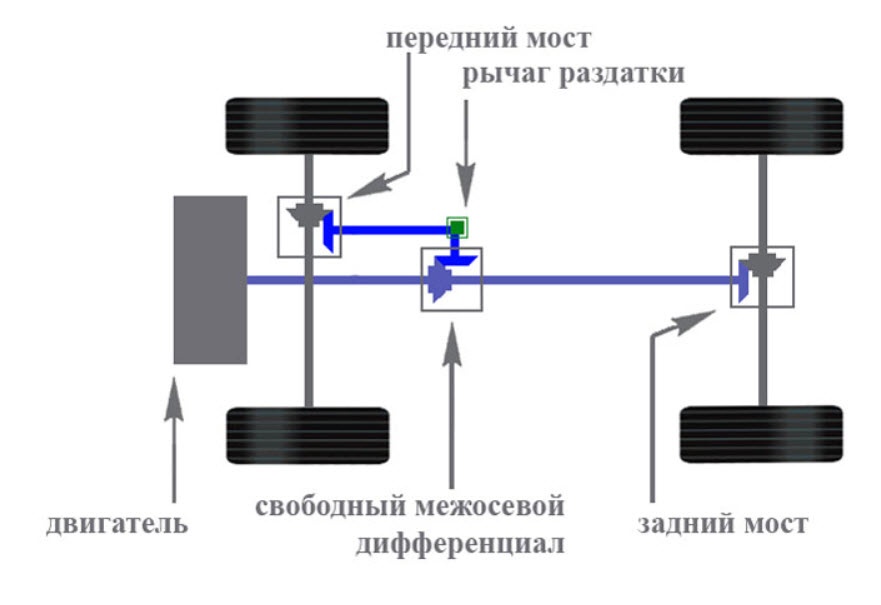
अलग-अलग गति पर आगे और पीछे के पहियों के घूमने की संभावना सुनिश्चित करने के लिए, जो कोनों में सूखे फुटपाथ पर महत्वपूर्ण है, ट्रांसफर केस में एक इंटरएक्सल मुक्त अंतर होता है, जिसे कम से कम दो ड्राइव पहियों को बंद करने के लिए अवरुद्ध किया जा सकता है। -सड़क जब अन्य दो फिसल जाते हैं।
इसमें एक डीमल्टीप्लायर भी है जो गति में समान कमी के साथ जोर को लगभग दोगुना कर देता है, जो अपेक्षाकृत कमजोर इंजन की काफी मदद करता है।
जब तक उनमें से एक रुक नहीं जाता तब तक ड्राइव पहियों पर टॉर्क हमेशा बना रहता है। इस प्रकार के प्रसारण का यह मुख्य लाभ है। इसे मैन्युअल रूप से जुटाने या जटिल स्वचालन बनाने के बारे में सोचने की आवश्यकता नहीं है।
स्वाभाविक रूप से, पीपीपी का उपयोग केवल एक निवा तक ही सीमित नहीं है। इसका इस्तेमाल कई महंगी प्रीमियम कारों में किया जाता है। जहां मुद्दे की कीमत वास्तव में मायने नहीं रखती।
साथ ही, ट्रांसमिशन को अतिरिक्त इलेक्ट्रॉनिक सेवाओं के एक समूह के साथ आपूर्ति की जाती है, मुख्य रूप से अतिरिक्त बिजली के साथ नियंत्रणीयता में सुधार करने के लिए, योजना इसकी अनुमति देती है।

Автоматический
ऑटोमेशन के साथ एक अतिरिक्त ड्राइव एक्सल को जोड़ने के कई संस्करण हैं, दो विशिष्ट योजनाओं को प्रतिष्ठित किया जा सकता है, जिनका उपयोग बीएमडब्ल्यू और कई अन्य प्रीमियमों पर किया जाता है, और बड़े पैमाने पर क्रॉसओवर के लिए विशिष्ट रियर व्हील ड्राइव में एक क्लच होता है।
पहले मामले में, सब कुछ एक इलेक्ट्रॉनिक ड्राइव के साथ razdatka में क्लच को सौंपा गया है। तेल में काम करने वाले इस क्लच को दबाना या घोलना, एक विस्तृत श्रृंखला में अक्षों के साथ क्षणों के वितरण को बदलना संभव है।
आमतौर पर, एक शक्तिशाली इंजन के साथ शुरू करते समय, जब मुख्य ड्राइव के पीछे के पहिये फिसलने लगते हैं, तो उनकी मदद के लिए सामने वाले को जोड़ दिया जाता है। अन्य पुनर्वितरण एल्गोरिदम भी हैं, वे नियंत्रण इकाइयों की मेमोरी में हार्डवायर्ड होते हैं जो कई सेंसरों की रीडिंग पढ़ते हैं।
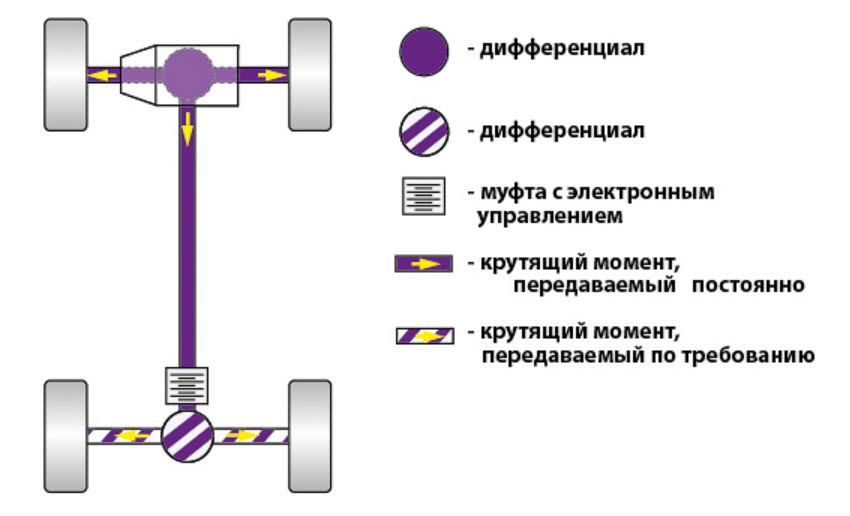
दूसरा मामला समान है, लेकिन मुख्य पहिये सामने हैं, और पीछे वाले कार्डन शाफ्ट और एक्सल गियरबॉक्स के बीच युग्मन के माध्यम से थोड़े समय के लिए जुड़े हुए हैं।
क्लच जल्दी गर्म हो जाता है, लेकिन इसके लंबे समय तक काम करने की उम्मीद नहीं है, बस कभी-कभी आपको फिसलन भरी सड़क पर या कठिन मोड़ पर कार को रियर एक्सल पर थोड़ा धक्का देने की आवश्यकता होती है। 4×4 संशोधन में लगभग सभी क्रॉसओवर इसी प्रकार बनाए जाते हैं।
मजबूर
ऑल-व्हील ड्राइव का सबसे सरल और सस्ता प्रकार, उपयोगिता एसयूवी में उपयोग किया जाता है जिनका स्थायी कार्यस्थल फुटपाथ से दूर होता है। रियर एक्सल एक निरंतर ड्राइविंग एक्सल के रूप में कार्य करता है, और यदि आवश्यक हो, तो ड्राइवर बिना किसी अंतर के फ्रंट एक्सल को कठोर रूप से चालू कर सकता है।
इसलिए, कठोर सतह पर, कार को रियर-व्हील ड्राइव होना चाहिए, अन्यथा ट्रांसमिशन क्षतिग्रस्त हो जाएगा। लेकिन ऐसी मशीनों में सुरक्षा का बड़ा मार्जिन होता है, मरम्मत करना आसान और सस्ता होता है।
कई आयातित पिकअप और एसयूवी में ऐसे संशोधन होते हैं, जो कभी-कभी अधिक उन्नत वैकल्पिक ड्राइव संस्करणों में महंगे और जटिल होते हैं।
4WD (4x4) के फायदे और नुकसान
माइनस, वास्तव में, एक - मुद्दे की कीमत। लेकिन यह हर जगह दिखाई देता है:
- शुरू में कार अधिक कठिन होती है, इसलिए खरीदते समय महंगी पड़ती है;
- अधिक बार मरम्मत की आवश्यकता होती है, जितने अधिक उपकरण, उतनी ही कम विश्वसनीयता;
- अतिरिक्त घूमने वाले भागों के कारण, अधिक ईंधन खपत;
- वजन बढ़ता है, जो गतिशीलता और दक्षता को प्रभावित करता है;
- इकाइयों के लेआउट में बढ़ती जटिलता, जो रखरखाव की जटिलता में परिलक्षित होती है।
बाकी सब योग्यता है:
- उत्तम क्रॉस-कंट्री क्षमता, सभी पहिये टॉर्क से भरे हुए हैं;
- नियंत्रित धुरी पर अतिरिक्त थ्रस्ट वेक्टर के कारण मशीन बेहतर नियंत्रित होती है;
- फिसलन भरी सड़कों पर बेहतर गतिशीलता, टायर कम फिसलते हैं;
- जोर का पुनर्वितरण भागों की ताकत की आवश्यकताओं को कम कर देता है;
- टायर ट्रेड रबर अधिक समान रूप से घिसता है।
यह सब शक्तिशाली और महंगी मशीनों पर ऑल-व्हील ड्राइव का व्यापक रूप से उपयोग करना संभव बनाता है, जहां कीमत में वृद्धि इतनी महत्वपूर्ण नहीं है।
चार पहिया ड्राइव वाली कार कैसे चलायें?
ऑल-व्हील ड्राइव की सभी संभावनाओं को साकार करने के लिए, किसी विशेष कार की डिज़ाइन सुविधाओं का अध्ययन करना आवश्यक है, यह समझने के लिए कि इसकी ट्रांसमिशन योजना कैसे काम करती है।
- डामर पर सेंटर डिफरेंशियल के बिना प्लग-इन ऑल-व्हील ड्राइव का उपयोग न करें, इससे तेजी से टूट-फूट होगी।
- कोनों में फिसलन भरी सड़कों पर ड्राइविंग का अभ्यास करने के लिए, अक्सर ऑल-व्हील ड्राइव कारें, विशेष रूप से फ्री डिफरेंशियल या स्वचालित टॉर्क ट्रांसफर वाली कारें, अप्रत्याशित रूप से व्यवहार कर सकती हैं, व्यवहार को फ्रंट-व्हील ड्राइव से रियर-व्हील ड्राइव में बदल सकती हैं और इसके विपरीत। और एक मोड़ में गैस पेडल के साथ बिल्कुल विपरीत रणनीति के साथ काम करना आवश्यक है, कर्षण जोड़ने के लिए एक कार या तो मोड़ के अंदर एक स्किड के साथ दूर जा सकती है, या सामने वाले धुरी को बाहर खिसकाना शुरू कर सकती है। यही बात रियर एक्सल स्किड की डैम्पिंग पर भी लागू होती है जो शुरू हो गई है।
- सर्दियों में 4×4 की अच्छी स्थिरता ड्राइवर के लिए अचानक ख़त्म हो सकती है। आपको इसके लिए तैयार रहने की आवश्यकता है, क्योंकि मोनो-ड्राइव कारें हमेशा पहले से ही कर्षण के नुकसान की चेतावनी देती हैं।
- उत्कृष्ट क्रॉस-कंट्री क्षमता के कारण कीचड़ वाले "घात" या बर्फ के मैदानों की बिना सोचे-समझे यात्रा नहीं करनी चाहिए। ट्रैक्टर के बिना ऐसी परिस्थितियों से बाहर निकलने की क्षमता ट्रांसमिशन में ऑटोमेशन की क्षमता की तुलना में चुने गए टायरों पर अधिक निर्भर करती है।
साथ ही, एक उचित ड्राइविंग रणनीति में, एक ऑल-व्हील ड्राइव कार हमेशा उन परेशानियों से बचने में मदद करेगी जो मोनोड्राइव में बहुत पहले आ जाती हैं। बस इसका अति प्रयोग न करें.

भविष्य में, सभी कारों को ऑल-व्हील ड्राइव प्राप्त होगी। इसका कारण इलेक्ट्रिक वाहनों की प्रौद्योगिकी में प्रगति है। प्रत्येक पहिये के लिए एक इलेक्ट्रिक मोटर और उन्नत पावर इलेक्ट्रॉनिक्स के साथ एक योजना को लागू करना बहुत आसान है।
इन कारों को अब ड्राइव के प्रकार के बारे में इंजीनियरिंग ज्ञान की आवश्यकता नहीं है। ड्राइवर केवल एक्सीलेटर पेडल को नियंत्रित करेगा, बाकी काम कार करेगी।