4नियंत्रण
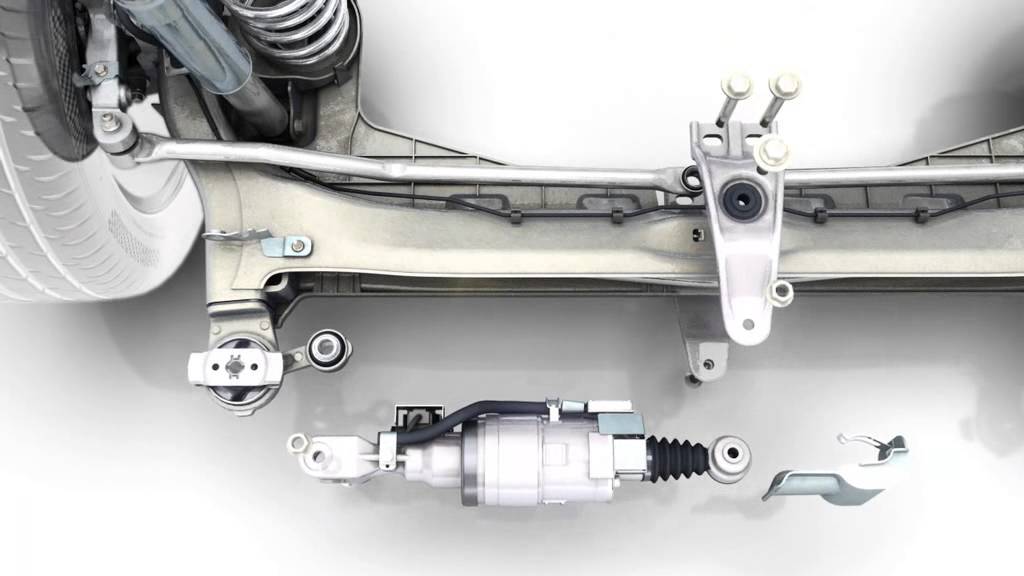
रेनॉल्ट द्वारा विकसित चार-पहिया स्टीयरिंग प्रणाली पूरी तरह से इलेक्ट्रॉनिक वाहन गतिशीलता नियंत्रण (एबीएस, ईएसपी, आदि) पर आधारित है।
60 किमी/घंटा से कम गति पर, पीछे के पहिये सामने वाली ट्रेन की विपरीत दिशा में मुड़ते हैं, जिससे मोड़ का दायरा कम हो जाता है और घुमावदार सड़कों पर कार की हैंडलिंग को बेहतर बनाने में मदद मिलती है।
इस गति से ऊपर, पीछे के पहिये आगे के पहियों के समान दिशा में मुड़ते हैं, जिसके परिणामस्वरूप बेहद सटीक प्रक्षेप पथ और कम रोल होता है।

